Lie Group
Lie Group 李群
同时具有群结构和流形结构的数学对象
- 群结构:可以进行“乘法”(群运算)和“逆运算”,符合群的四个基本公理。
- 流形结构:是一个连续可微的空间,可以进行微积分运算。
Lie群是一种可以平滑变化的连续群,群元素之间不仅可以做代数运算,而且可以连续移动、微分、优化。
数学定义
一个集合
-
是一个群,群运算 和取逆运算 满足: - 封闭性:对于所有
,有 。 - 结合性:对于所有
,有 。 - 单位元存在:存在元素
,使得对于所有 ,有 。 - 逆元存在:对于所有
,存在 ,使得 。
- 封闭性:对于所有
-
是一个光滑流形,且群运算和取逆运算是光滑(可微)映射:
常见 Lie Group
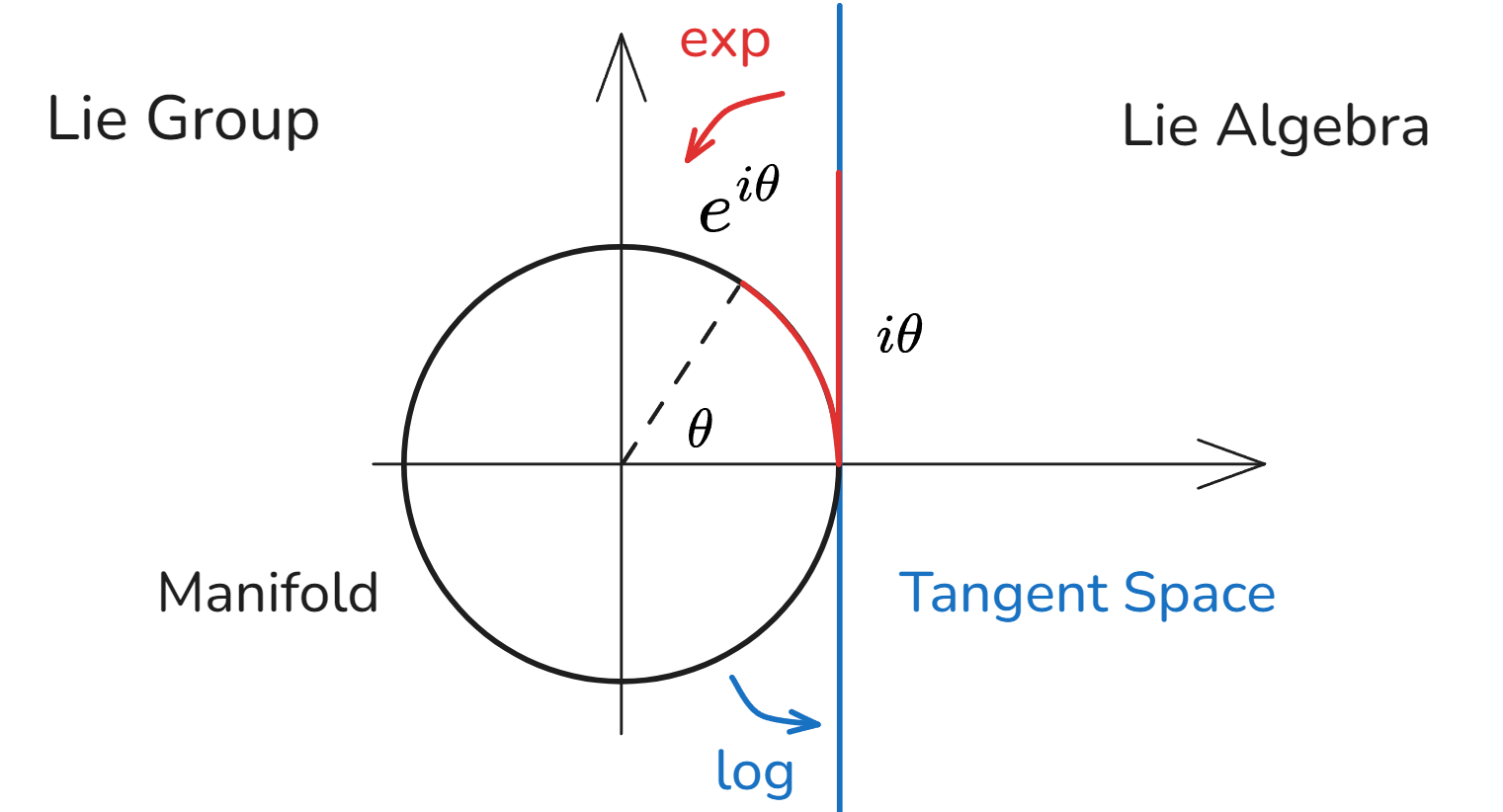
Lie群的微分结构由其李代数(Lie Algebra)描述。
Lie Group 描述全局运动(非线性),Lie Algebra 描述局部运动(线性)。
| Lie 群 | 群元素形式 | Lie 代数 | 解释 | 在机器人中的应用 |
|---|---|---|---|---|
| 二维平面旋转群 | 平面机器人、移动机器人姿态 | |||
| 三维空间旋转群 | 三维姿态,机械臂关节、无人机 | |||
| 平面刚体运动群(位置+角度) | 移动机器人位姿 | |||
| 空间刚体运动群(位置+姿态) | 机械臂末端运动、无人机运动 | |||
| 向量加法 | 向量本身 | 欧式空间,平移群 | 位置变化 |
核心运算
| 工具 | 作用 | 说明 |
|---|---|---|
| 指数映射(exp) | 李代数 → Lie群 | 用于从速度或微分量生成运动 |
| 对数映射(log) | Lie群 → 李代数 | 计算两个姿态之间的差异 |
| Hat运算(^) | 将向量转成反对称矩阵 | 常用于姿态误差建模 |
| Vee运算(∨) | 反对称矩阵转成向量 | 伴随Hat运算 |
| 伴随矩阵(Adjoint) | 坐标变换下李代数的映射 | 用于误差传播、变化率变换 |